2023年4月16日,百度Apollo在上海车展前夕举办汽车智能化发布会,发布全新升级的驾舱图产品矩阵,并重磅发布《百度智能驾驶开放白皮书》,面向车企开放四大关键能力。
以用户体验为中心,百度Apollo将旗下“驾舱图”产品矩阵进行全面焕新升级,旨在为消费者提供愉悦智行的智能化体验,帮助车企赢得智能化竞速赛。

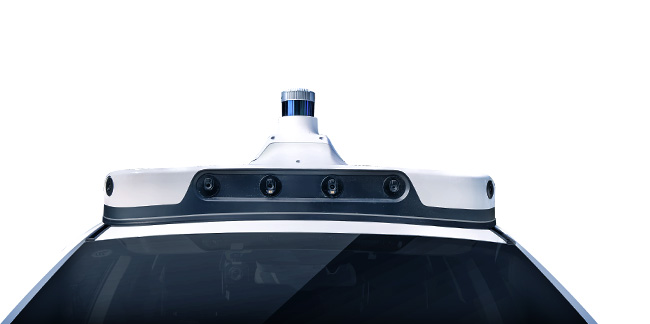
2023年百度Apollo推出中国首个能量产的纯视觉高阶智能驾驶方案-Apollo City Driving Max,即“百度Apollo纯视觉城市智能驾驶解决方案”,百度内部项目代号是ANP3.0,能实现L2+ 城市和高速领航辅助驾驶以及智能泊车的三域融通智能驾驶,已成功搭载吉利极越01智能汽车量产上市。
产品概要:
安全:智驾算法超8000万公里专业路测验证
L4技术与L2+城市智驾技术共生,算法经过超8000万公里专业路测验证,每一公里由持考核资质的测试人员验证完成,对系统有充分专业的验证。
熟路:自研新一代更轻量级的高精度地图,辅助纯视觉方案在中国道路最“熟路”
百度是同时自研自动驾驶和高精地图的智驾供应商,可谓是最懂自动驾驶的图和最懂图的驾组合,为Apollo City Driving Max打造了全新一代覆盖广而深的量产“轻地图”,保障智驾即便在复杂的道路拓扑结构下依然畅通无阻,给用户高获得感。
好体验:基于AI和云计算技术,真正以数据驱动智能驾驶体验持续进化
基于“驾云一体”的理念,结合百度在AI、云计算、自动驾驶的深厚积累,Apollo为智驾系统量身定制了配套的数据闭环工具链,助力车企在量产车规模级别也能高效地端到端进行数据资产管理和模型迭代,真正落地数据驱动智驾体验持续进化。
核心优势:
该智驾产品最大的差异化主张是「Vision takes all」,国内首家将“BEV+OCC+Transformer”纯视觉多任务统一网络技术量产上车,用更低的BOM成本实现了和「带激光雷达」一样好的智驾体验。
自研的4D BEV Transformer 技术将视觉测距精度从“普通卷尺”升级到“游标卡尺“,能精准感知交通参与物的时空位姿和速度轨迹;占用网络OCC补缺「纯视觉」最后一块拼图,能识别BEV难以表达的不规则物体,替代激光雷达但具备独特的语义认知扩展潜力。
纯视觉方案的实现离不开高品质的AI训练数据,依托百度Robotaxi 8000万公里路跑精炼上亿帧超高精数据,相比行业平均水平能供给类似「8K超清vs标清」的高品质模型训练真值数据,背靠百度云海量的AI算力集群实现周级模型迭代,为智驾持续进化保驾护航。
产品功能:
城市和高速高级领航辅助驾驶:通过自车环境感知和自研高精度地图辅助信息,支持自动巡航、拥堵跟车、导航变道和超车变道、过红绿灯路口、进出主辅路、上下匝道、穿行隧道等常见交通场景,此外也能礼让行人、专门避让大车、借道绕行、识别前车车灯信号及时做切车应对、智能推理被遮挡红绿灯信号、避让倾入道路的硬隔离栅栏等更智能、安全的智驾策略,几乎可以覆盖到日常出行的各种驾驶场景;
AVP自主泊车:除了具备像APA、RPA、AVM等辅助泊车功能外,新一代记忆泊车HAVP已同多家车企量产落地,能够在停车场里自动行驶到指定车位并安全泊入,反之也可以自动泊出到停车场的指定点位,通过三域融通感知共享技术为泊车“扩宽视野拉长视距”,使得AVP的停车场巡航速度最高提升到20km/h,后续还将实现跨层巡航泊车等复杂场景。
AP辅助驾驶:不依赖地图,通过实时识别地面车道线结构,能沿车道线自动进行一路向前、跟车、道路分合流和人工拨杆变道,也能跟车直行过路口,甚至能识别红绿灯信号,当失去车道线时可自动降级ACC继续提供辅助驾驶,进一步提升智驾的可获得感。
发展历史
截至2024年1月31日,Apollo City Driving Max的高阶领航辅助驾驶,搭载极越汽车已在全国40万公里道路对用户开箱即用

关闭