

2025-11-29
11月27日,百度Apollo向北京航空航天大学(下称"北航")捐赠一批自动驾驶车辆,用于支持学校在自动驾驶领域的科研教学和人才培养。


2025-10-24
近日,百度Apollo自动驾驶汽车正式驶入“沪上双壁”——复旦大学和同济大学,助力两所顶尖高校在自动驾驶领域的科研教育、人才培养与产业融合,共同探索产学研用深度融合的创新路径。

2025-09-17
百度Apollo欢迎并支持香港特区政府今日(17日)发表的《2025年施政报告》,提出:“加速自动驾驶在香港无人化、规模化发展,尽快达致商业营运。” 在香港特区政府的支持下,百度Apollo自去年获得首批自动驾驶车辆先导牌...

2025-09-11
吉利银河A7刚刚上市即成爆款,其凭借强大的综合实力和超高性价比,打造出前所未有的『越级』体验,上市后首周便冲上混动中型车周销榜首。

2025-09-01
8月29日,百度Apollo自动驾驶车辆捐赠仪式在大连理工大学未来技术学院举行。大连理工大学教育发展基金会副秘书长朱志伟及相关学院负责人等出席捐赠仪式,仪式由大连理工大学未来技术学院副院长江贺主持。

2025-08-12
百度Apollo向浙江大学教育基金会捐赠自动驾驶车辆,浙江大学计算机科学与技术学院加入百度Apollo“星火计划”。
2025-08-07
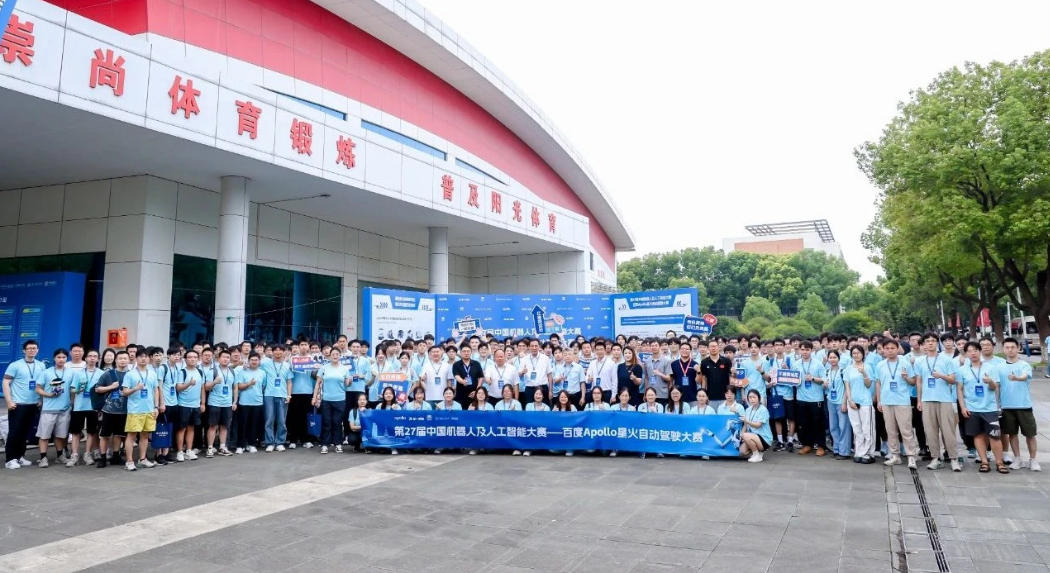
8月5日,第 27 届中国机器人及人工智能大赛 - 百度 Apollo 星火自动驾驶大赛总决赛在苏州圆满落幕。

2025-06-17
6月15日,百度Apollo自动驾驶车辆捐赠仪式在北京工商大学计算机与人工智能学院举行。捐赠仪式上,百度Apollo正式向北京工商大学计算机与人工智能学院捐赠自动驾驶车辆,并提供完整的全套自动驾驶套件,包括使用Apoll...

2025-05-30
百度Apollo正式向湖南工商大学 、湘江实验室捐赠第四代自动驾驶车辆,湘江实验室成为国内首家拥有L4级别前装量产自动驾驶汽车的科研单位。

2025-05-09
2025年5月8日,Apollo与中国最大的租车平台神州租车在北京举行战略签约仪式,并宣布正式达成深度合作。双方将联合推出全球首个自动驾驶汽车租赁服务,依托技术创新与场景应用,为广大用户提供普惠化的智能出行服务

2025-04-18
2025年4月百度地图正式发布V21版本,全面升级为全球首个“智驾级导航”,以五大能力重构导航体验,为智能辅助驾驶系统安全护航。
关闭













